Examples gallery¶
Runnable scripts that render these figures live in
examples/. They are
not part of the installed package (only cpomdp itself ships in the wheel) — they
import plotting libraries the core does not depend on. Get those with the examples
extra:
…or, from a source checkout, with uv: uv run --extra examples python examples/<script>.py.
Flagship — four bacilli, one knob (the goal precision Λ)¶
Four bacilli in one world, differing in a single number: the goal precision Λ each
is built with (ObservationGoal(precision=…)). They all minimise the same Expected
Free Energy G = pragmatic − epistemic; Λ scales the pragmatic (goal) term but not the
epistemic (information) one, so it alone tips the balance. A beacon marks where the
sensor is sharp, so visiting it collapses the agent's uncertainty. Classic LQR beelines
to the food; a sharp Λ barely deflects; a balanced Λ detours to the beacon to localise
then heads to the food; a weak Λ never leaves. The simulation is real — every agent
shares one Kalman filter over a CallableSensor whose R(x) dips at the beacon, and
the EFE agents call the library's own expected_free_energy kernel.
The journey¶
Bacillus seeking food — the original (pure LQR)¶
Where it started (v0.2): a single bacillus with a fixed sensor, so the epistemic term collapses to nothing (ADR-003) and active inference reduces to LQR — it perceives, acts, and arrives. The flagship above is its v0.3 successor, switching the epistemic term back on with a state-dependent sensor.
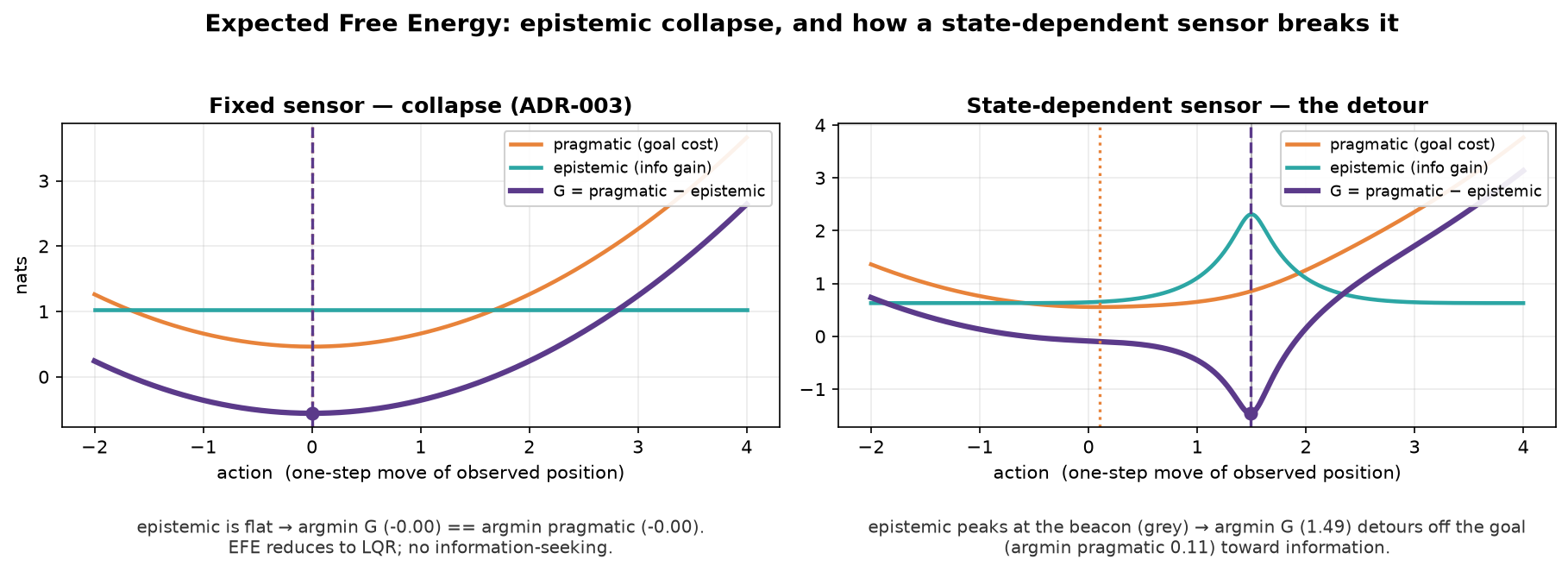
EFE epistemic collapse, and how a state-dependent sensor breaks it¶
Sweeps a one-step action and plots G = pragmatic − epistemic for a fixed sensor
(epistemic dead-flat → EFE collapses to LQR) versus a state-dependent sensor (a precision
well makes the epistemic term curve, pulling the argmin off the goal toward information).
Internal process noise breaks the collapse from the inside¶
The companion: the sensor noise R is held fixed and the action-dependence of the
epistemic term comes entirely from state-dependent process noise Q(x) — the
internal-precision route of RFC-001 §8.
